Various Stretch RE2 Projects

Behavioral Studies & Applied Robotics
Overview
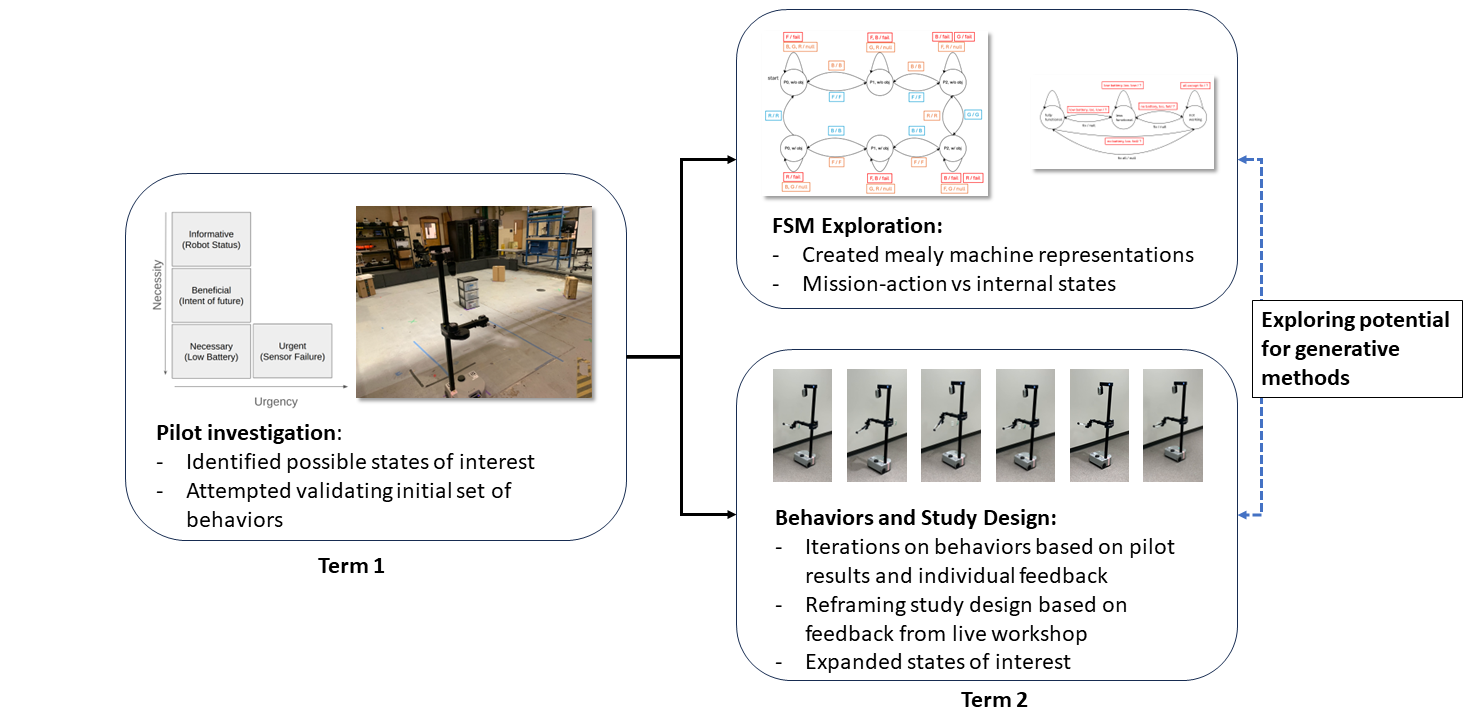
Consequential robot motion and sound has been shown to impact the perception of robotic systems; this could affect the perceived trust in their ability to carry out their objectives. These projects explored two avenues, one through sound the other through motion on a Stretch RE2. The former acted as a replication study based on previous efforts on mobile robots using continuous and functional sound as a way to indicate completion and convey location. The latter explored using motion as a way to convey key state information: whether a module of the robot was in-fault and why.
Technical Details
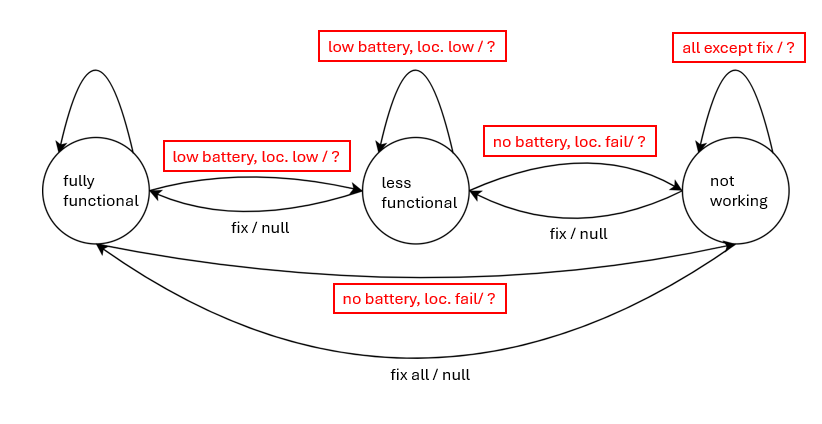
I worked on the experimental design and setup of both studies. I designed finite state machines in order to manage robot behavior for the sound study navigation task from the pickup location to drop-off for the participants. I utilized R and Python for the data analysis. For the motion study, I designed services and actions in ROS to enable pickup based on Aruco tags and also to allow for the execution of other expressive motor behaviors during navigation. In a group of 2, we explored a set of relevant states and failures that could occur during a pick and place task and worked to replicate the environment and states for our human-subject study.
Methods & Tools
- Human Subject Studies
- Qualitative Research
- Python
- R
- Jamovi